摘要
在疫情防控趋于常态化的当下,口罩已经成为我们外出必不可少的一件装备,带着口罩的人脸识别呈现出一定难度和迫切的现实需求,所以我希望基于 YOLOv5 算法复现一个口罩检测系统,使用 YOLOv5 训练检测人脸和口罩的模型,并使用pyqt5 做一个图形化的界面。本文介绍了 YOLOv5 模型的框架和具体的训练过程。
1 问题分析
基本功能:用户提交一张照片/一段视频。训练好的模型能够自动框出人脸在画面中的位置,并判断是否佩戴口罩,标注 face/mask。
问题拆分:需要能够实现多个目标检测的模型;需要足够多的人脸及戴口罩的人脸的数据集以供训练和检测。
拓展需求:尝试不同的训练参数(置信度、NMS、训练轮数 epoch)进行训练, 分析它们对最终结果产生的影响。
2 方法介绍
2.1 模型选择
目标识别是一种基于目标几何和统计特征的图像分割。主要评价指标有:交并比(IoU)、准确率(Precision)、召回率(Recall)、单类平均准确率(Average-Precision) 等。
人脸和口罩检测的模型属于目标检测模型,是对物体分类之后的更进一步, 涵盖类别和位置信息。除了传统的 CV 算法,基于深度学习的经典检测方法包括one-stage 和 two-stage,后者如 RCNN 等多了一步提取出候选框的操作,纵然精度较高但麻烦、处理时间长,前者如YOLO 是从CNN 特征回归直接得到检测目标, 损失了一定的精度但便捷快速,适合用于对实时性要求高的检测,如视频检测、实时监测等。
YOLOv5(You Only Look Once)是一种有监督的深度学习算法,可以实现 end to end,输入一张图片不需要经过任何处理直接通过模型就可以得到结果。它的基本思想如下图所示:经过卷积神经网络得到一定大小的特征图,将特征图划分为S*S 的栅格(grid cells),每个栅格负责对落入其中的目标进行检测,一次性预测所有栅格所含目标的边界框(bounding boxes)、定位置信度(confidence)、以及所有类别概率向量(class probability map),其中:边界框表征目标的大小以及精确位置, 置信度表征预测框的可信程度,取值范围 0~1,值越大说明该矩形框中越可能存在目标,类别概率向量表征目标所属类别的可能性。
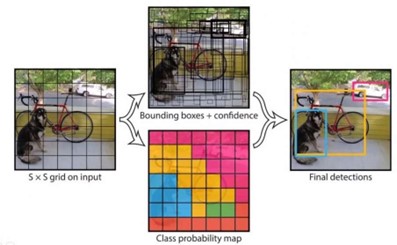
图 1 YOLO 算法基本思想
在实际检测的步骤如下:首先判断每个预测框的预测置信度是否超过设定阈值,若超过则认为该预测框内存在目标,从而得到目标的大致位置。接着根据非极大值抑制算法(NMS)对存在目标的预测框进行筛选,剔除对应同一目标的重复矩形框。最后根据筛选后预测框的分类概率,取最大概率对应的索引,即为目标的分类索引号,从而得到目标的类别。
YOLOv5 提供了 YOLO5s、YOLOv5m、YOLOv5l、YOLOv5x 的四种模型,这几种模型的网络结构相似,YOLOv5s 是四种网络中最小最基础的模型,其他的三种模型都是在其基础上加深深度和加宽宽度。YOLOv5s 模型基于残差网络(ResNet)架构,采用多尺度预测的方式,用于目标检测和识别。它的优点在于尺寸小、速度快,适合在移动设备或嵌入式系统中使用。但由于模型尺寸较小,准确率可能会有所下降。但由于考虑到我拥有设备的算力大小,和需要的模型规模大小,选择使用 YOLOv5s 模型,最符合设计需求。
2.2 网络结构
YOLOv5 的网络结构主要由 Backbone、Neck、Head 组成,其中 Backbone
主要使用 CSPdarknet+SPP 结构,Neck 使用 PANet 结,Head 使用 yolov3 head。
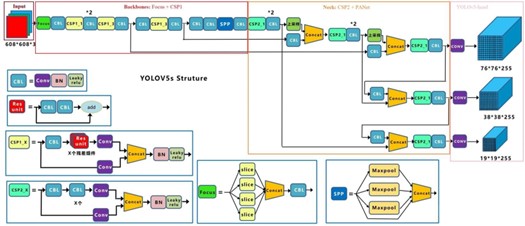
图 2 YOLOv5 总体网络结构
2.2.1 Anchor 设定
YOLOv5 采用 anchor-based 的方法进行目标检测,使用不同尺度的 anchor 直接回归目标框并一次性输出目标框的位置和类别置信度。最初的YOLOv1 的初始训练过程很不稳定,在 YOLOv2 的设计过程中,作者观察了大量图片的 ground truth(gt),发现相同类别的目标实例具有相似的 gt 长宽比:比如车的 gt 都是矮胖的长方形,行人的 gt 都是瘦高的长方形。所以作者受此启发,从数据集中预先准备几个概率比较大的 bounding box,再以它们为基准进行预测,如下:
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
其中,浅层的特征图(P3),包含较多的低层级信息,适合用于检测小目标, 所以这一特征图所用的 anchor 尺度较小;同理,深层的特征图(P5),包含更多高层级的信息,如轮廓、结构等信息,适合用于大目标的检测,所以这一特征图所用的 anchor 尺度较大。P4 特征图上就用介于这两个尺度之间的 anchor 用来检测中等大小的目标。YOLOv5 之所以能高效快速地检测跨尺度目标,这种对不同特征图使用不同尺度的 anchor 的思想功不可没。
对于大部分图片而言,由于其尺寸与我们预设的输入尺寸不符,所以在输入阶段就做了 resize,导致预先标注的 bounding box 大小也发生变化。而 anchor 是根据我们输入网络中的 bounding box 大小计算得到的,所以在这个 resize 过程中就存在 anchor 重新聚类的过程。在 yolov5/utils/autoanchor.py 文件下,有一个函数 kmeans_anchor,通过 kmeans 的方法计算得到 anchor。
2.2.2 Backbone 特征提取骨干网络模块
(1) Focus
Focus 是一种对 feature map 的切片操作把宽度(width)和高度(height)的信息整合到通道(channel)维度,具体来说就是将相距为 2 的四个位置进行堆叠到一个通道上去,因此长和宽都缩小两倍,通道数增加了 4 倍,Focus 模块设计用于降低 FLOPS 和提高速度,而不是提高 mAP。
1. class Focus(nn.Module):
2. # Focus wh information into c-space
def init (self, c1, c2, k=1, s=1, p=None, g=1, act=T
rue): # ch_in, ch_out, kernel, stride, padding, groups
4. super(Focus, self). init__()
5. self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
6.
7. def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
8. #::2 从 0 开始每两个取一个数, 1::2 从 1 开始每两个取一个数
第一维是c ,第二维是 w,第三维是 h
9. #x[..., ::2, ::2] 长宽从0 开始相距2 的位置也就是上图中的
黄色 0,x[..., 1::2, ::2] 宽从 1 长从 0 开始相距 2 的位置也就是上图
中的绿色 1
10. #因此x[..., ::2, 1::2]为红色 2,x[..., 1::2, 1::2]为
蓝色 3,
11. #最后cat 将这四个部分拼接到第一维 c,所以通道数c 扩大四倍,
w 和h 各缩小两倍
12. return self.conv(torch.cat([x[..., ::2, ::2], x[...
, 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
(2) CSP 结构(Cross Stage Partial)
CSP 结构是从网络结构设计的角度,来解决以往工作在推理过程中,需要很大计算量的问题。CSP 结构认为网络优化中的梯度信息重复导致推理计算繁复。CSP 结构通过将基础层的特征图划分为两个部分,然后通过 CSP 结构将它们合并, 可以在能够实现更丰富的梯度组合的同时减少计算量。
YOLOv5 使用CSPDarknet 作为Backbone,从输入图像中提取丰富的信息特征。 CSPNet 解决了其他大型卷积神经网络框架Backbone 中网络优化的梯度信息重复问题,将梯度的变化从头到尾地集成到特征图中,因此减少了模型的参数量和FLOPS 数值,既保证了推理速度和准确率,又减小了模型尺寸。
YOLOv5 采用了两种的 CSP 结构,第一种主要在 Backbone 中使用 CSP_1(结构图中明黄色)其中的 Bottleneck 就是采用 Res 结构,第二种就是在 Neck 中使用 CSP_2(结构图中蓝绿色)其中的 Bottleneck 没有采用 Res 结构。
CSP 结构代码:common.pyc - BottleneckCSP
1. class BottleneckCSP(nn.Module):
2. # CSP Bottleneck https://github.com/WongKinYiu/CrossSta
gePartialNetworks
3. def init (self, c1, c2, n=1, shortcut=True, g=1, e=0
.5): # ch_in, ch_out, number, shortcut, groups, expansion
4. super(BottleneckCSP, self). init ()
5. c_ = int(c2 * e) # hidden channels
6. self.cv1 = Conv(c1, c_, 1, 1) #Conv = Conv2d + B
atchNorm2d + LeakyReLU
7. self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
8. self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
9. self.cv4 = Conv(2 * c_, c2, 1, 1)
10. self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(
cv2, cv3)
11. self.act = nn.LeakyReLU(0.1, inplace=True)
12. self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcu
t, g, e=1.0) for _ in range(n)]) #n 个 Bottleneck
13.
14. def forward(self, x):
15. #特征图分为两个部分
16. #第一部分:先后经过 Conv(C+B+L) 和 n 个 Bottleneck 以
及 Conv2d 得到 y 1
17. y1 = self.cv3(self.m(self.cv1(x)))
18. y2 = self.cv2(x) #第二部分:经过卷积 conv 得到 y2
19. #合并两个部分:cat y1 和 y2, 然后进行 BatchNorm2d 标准
化 和 LeakyReLU 激活 再经过 Conv
20. return self.cv4(self.act(self.bn(torch.cat((y1, y2)
, dim=1))))
(3) LeakyReLU
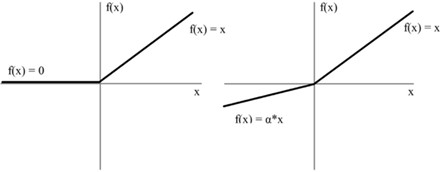
图 3 ReLU 和 LeakyReLU 函数图像
ReLU 是最常用的激活函数,ReLU(x) = max(0, x),但 ReLU 会面临一个问题, 在训练过程中部分神经元不会被激活,导致相应的参数永远不能被更新,为了解决这种问题,改进版本 LeakyReLU 提出了将 ReLU 的前半段设为 ax 而非 0。LeakyReLUa(x)=max(ax, x),激活函数有一个参数 a,控制着 leaks 的数量,斜率非常的小,但是能够保证神经元能够激活。
pytorch 里相关的函数为:torch.nn.LeakyReLU(0.1,inplace=True)
(4) SPP 层:Spatial Pyramid Pooling(空间金字塔池化)
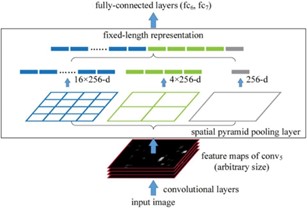
图 4 Spatial Pyramid Pooling 原理图
如上图,feature maps 是经过三个 pooling 窗口进行池化,将分别得到的结果在channel 维度进行concat。SPP 可以增大感受野,有助于解决anchor 和feature map 的对齐问题。引入 SPP 层将原有多个不同尺寸的图片可以统一输入到网络, 规范下一层的输入。
SPP 的代码如下: common.py - class SPP
1. class SPP(nn.Module):
2. # Spatial pyramid pooling layer used in YOLOv3-SPP
3. def __init__(self, c1, c2, k=(5, 9, 13)):
4. super(SPP, self).__init__()
5. c_ = c1 // 2 # hidden channels
6. self.cv1 = Conv(c1, c_, 1, 1)
7. self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
8. self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=
x, stride=1, padding=x // 2) for x in k])
9.
10. def forward(self, x):
11. x = self.cv1(x)
12. return self.cv2(torch.cat([x] + [m(x) for m in se
lf.m], 1))
2.2.3 Neck 特征融合网络模块
YOLOv5 的 Neck 部分采用了 PANet 结构,Neck 主要用于生成特征金字塔。特征金字塔会增强模型对于不同缩放尺度对象的检测,从而能够识别不同大小和尺度的同一个物体。
PANet 结构是在 FPN 的基础上引入了 Bottom-up path augmentation 结构。FPN 主要是通过融合高低层特征提升目标检测的效果,尤其可以提高小尺寸目标的检测效果。Bottom-up path augmentation 结构可以充分利用网络浅特征进行分割,网络浅层特征信息对于目标检测非常重要,因为目标检测是像素级别的分类浅层特征多是边缘形状等特征。PANet 在 FPN 的基础上加了一个自底向上方向的增强,使得顶层 feature map 也可以享受到底层带来的丰富的位置信息,从而提升了大物体的检测效果。如下图所示,(a)FPN backbone, (b)Bottom-up path augmentation。
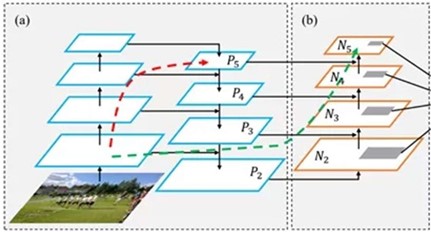
图 5 Bottom-up path augmentation 结构
2.2.4 Head 推理网络模块
Head 进行最终检测部分,在 yolov5.yaml 的相关配置如下:
[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1]], # 26 (P5/32-large)
YOLOv5 采用了与 YOLOv3 相同的 head 网络,都是 1*1 的卷积结构,并有三组
output,输出的特征图大小分辨为:
-
bs * 255 * 80 * 80;
-
bs * 255 * 40 * 40;
-
bs * 255 * 20 * 20;
其中,bs 是 batch size,255 的计算方式为 [na * (nc + 1 + 4)],具体参数含义如下:
-
na(number of anchor) 为每组 anchor 的尺度数量(YOLOv5 中一共有 3 组anchor,每组有 3 个尺度);
-
nc 为 number of class;
- 1 为前景背景的置信度 score;
- 4 为中心点坐标和宽高;
最后,输出的特征图上会应用锚定框,并生成带有类别概率、置信度得分和包围框的最终输出向量。与 YOLOv3 不同的是,在 anchor 上 YOLOv5 跨网格匹配规则的方式来区分 anchor 的正负样本。
2.3 损失函数的定义
损失函数的作用为度量神经网络预测信息与期望信息(标签)的距离,预测信息越接近期望信息,损失函数值越小。训练时主要包含三个方面的损失:分类损失(classification loss)、置信度损失(confidence loss)、定位损失(location loss)。
表 1 损失函数的组成
| 损失类型 | 计算方法 | 计算对象 |
|---|---|---|
| confidence loss 置信度损失(是否存在目标) | BCE loss(二值交叉熵损失) | 所有样本的损失(预测边界框与 GT Box 的误差) |
| classification loss 分类损 失(分类是否准确) | BCE loss(二值交叉熵损 失) | 只计算正样本的分类损 失 |
| location loss 定位损失 (是否定位准确) | CIoU loss | 只计算正样本的定位损失(预测边界框与 GT Box 的误差) |
2.3.1 定位损失计算
比较各个 IoU 系列损失函数的不同点:
-
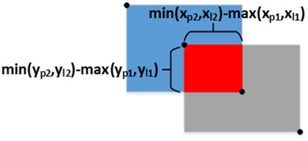
IOU_Loss:主要考虑检测框和目标框重叠面积。
-
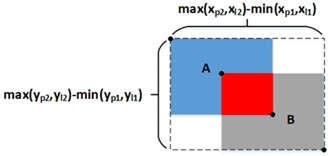
GIOU_Loss:在 IOU 的基础上,加上一个可以框住 A、B 的大矩形框,解决边界框不重合时的问题。
-
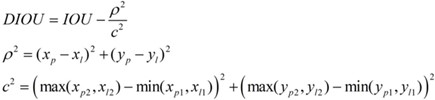
DIOU_Loss:在 IOU 和 GIOU 的基础上,考虑边界框中心点距离的信息。
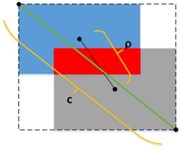
定义为:
-
CIOU_Loss:在 DIOU 的基础上,考虑边界框宽高比的尺度信息。定义为:
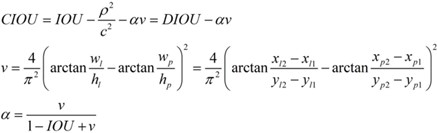
这样 CIOU_Loss 就将目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比全都考虑进去了。loss(CIOU)=1-CIOU
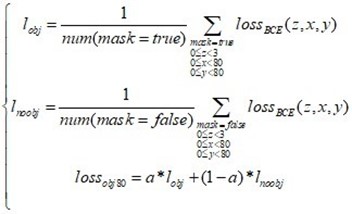
2.3.2 置信度损失计算
对于一张图像分割成的 80x80 的网格,神经网络对其中每个格子都预测三个位于该格子附近的矩形框(简称预测框),每个预测框的预测信息包括中心坐标、宽、高、置信度、分类概率,因此神经网络总共输出 3x80x80 个 0~1 的预测置信度,与 3x80x80 个预测框一一对应。预测框的置信度越大表示该预测框越可信,也即越接近目标的真实最小包围框。
标签的维度应该与神经网络的输出维度保持一致,因此置信度的标签也是维度为 3x80x80 的矩阵。利用 mask 掩码矩阵:以维度同样为 3x80x80 的 mask 矩阵为标记,对置信度标签矩阵进行赋值。对 mask 为 true 的位置不直接赋 1,而是计算对应预测框与目标框的 CIOU,使用 CIOU 作为该预测框的置信度标签, 对 mask 为 false 的位置直接赋 0。所以,标签值的大小与预测框、目标框的重合度有关,两框重合度越高则标签值越大。不过,CIOU 的取值范围是-1.5~1, 而置信度标签的取值范围是 0~1,所以需要对CIOU 做一个截断处理:当 CIOU 小于 0 时直接取 0 值作为标签。
BCE loss 损失函数
假设置信度标签为矩阵 L,预测置信度为矩阵 P,那么矩阵中每个数值的 BCE loss 的计算公式如下:

BCE loss 要求输入数据的取值范围必须在 0~1 之间。从而得到 80x80 网格的置信度损失值:
2.3.3 分类损失计算
神经网络对 80x80 网格的每个格子预测三个预测框,每个预测框的预测信息都包含了 N 个分类概率。其中 N 为总类别数,比如 COCO 数据集有 80 个类别,那么 N 取 80,本项目 N=2。所以对于数据集,每个预测框有 N 个 0~1 的分类概率,那么网络总共预测 3x80x80xN 个分类概率,组成预测概率矩阵。
80x80 网格的标签概率矩阵与预测概率矩阵的维度一样,也是 3x80x80xN。每个预测框的标签,由解析 json 标签文件得到,是一个 0~N-1 的数值,需要将0~N-1 的数值转换成 N 个数的独热码。为了减少过拟合,且增加训练的稳定性, 通常对独热码标签做一个平滑操作。同样假设置标签概率为矩阵 Lsmooth,预测概率为矩阵 P,那么矩阵中每个数值的 BCE loss 的计算公式类似。
3 方法实现
3.1 训练过程
3.1.1 数据集
本文数据集来自互联网、COCO 数据集和 WIDER FACE,从中提取有关人脸和口罩的图片。按照 4:1 的比例划分数据集和验证集,经过筛选出 1600 个训练集,400 个验证集。
使用 labelimg 软件进行数据标注:在收集好的图片文件夹的同级目录下,新建一个 labels 文件夹用于存放打标的记录,每一张图片与一个记录了目标框信息的文本文件一一对应。

图 6 labelimg 标注图片
文本文件中每一行表示一个目标,以空格进行区分,分别表示目标的类别信息(0 代表 mask,1 代表 face),和归一化处理之后的中心点 x 坐标、y 坐标、目标框的 width 和 height。

图 7 图片与对应的标注信息
典型的数据增强算法有如下几种:
表 2 数据增强
| 类型名称 | 作用效果 |
|---|---|
| Mosaic | 多张图片合成一张,增加数据的多样性 |
| Copy paste | 实例分割,将每个目标复制粘贴多次 |
| Random affine | 随机缩放平移 |
| MixUp | 透明度重叠 |
| Augment HSV | 色度 饱和度 明度 |
| Random horizontal flip | 随机水平翻转 |
为了对模型具有良好的泛化性和有效性,本算法使用 Mosaic 数据增强:
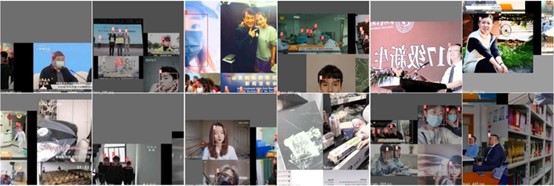
图 8 mosaic 数据增强
3.1.2 模型训练
本算法采用的平台为 PyTorch1.13(1.13.1+cu117)深度学习框架,Cuda(及 cudnn) 版本为 cuda11.7,Python 版本为 3.8。使用笔记本电脑操作系统为 Windows11, Intel(R) Core(TM) i9-12900H CPU@ 2.50 GHz,Ge-Force GTX 3060 进行模型训练和验证集的测试。

图 9 cuda、pytorch 版本
需要修改:
1、数据集配置文件中的数据集地址(mask_data.yaml)
2、模型配置文件中类别数(mask_yolov5s.yaml)
执行命令用到的其他参数为:
3、预训练模型的权重(pretrained/yolov5s.pt)
4、训练轮数(epoch 200)
5、一次训练所选取的样本数(batch-size 8)
执行 python train.py –data mask_data.yaml –cfg models/mask_yolov5s.yaml
–weights pretrained/yolov5s.pt –epoch 200 –batch-size 8 –device 0
3.2 测试数据及结果展示
3.2.1 评价指标
表 3 混淆矩阵名词解释
| True 正确 正类 | False 错误 负类 | |
|---|---|---|
| Positive 被检测到 | TP(正确的检测了) | FP(错误的检测了) |
| Negative 未被检测到 | TN(正确的没检测) | FN(错误的未检测,本应该 检测到的) |
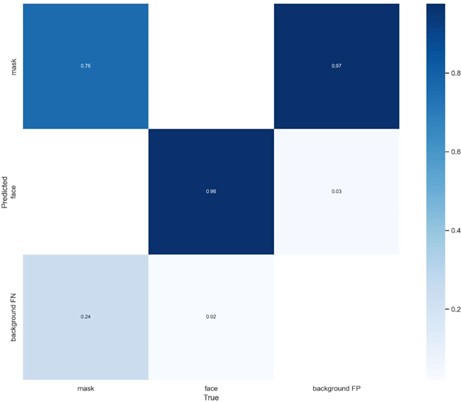
图 10 混淆矩阵
表 4 评价指标
| P | Precision,精确率=正确数 TP / 预测总数(TP+FP) |
|---|---|
| R | Recall,召回率=预测正确数 TP /某类真实总数(TP+FN) |
| mAP | mean Average Precision=每个类的 AP 值的平均数 1 AP=∫0 𝑝(𝑟)𝑑𝑟 |
| mAP@.5 | 当 IoU 为 0.5 时的 mAP |
|---|---|
| mAP@.5 : .95 | 当 IoU 为 range(0.5 : 0.95)时的 mAP 的平均数 |
PR 图:横坐标是 R 值,纵坐标是 P 值,曲线表示当召回率为 R 时,精确率 P 的大小。P 值是随着 R 的升高而降低, PR 图左下方的面积越大,则表示模型对该数据集的效果越好。
3.2.2 结果分析
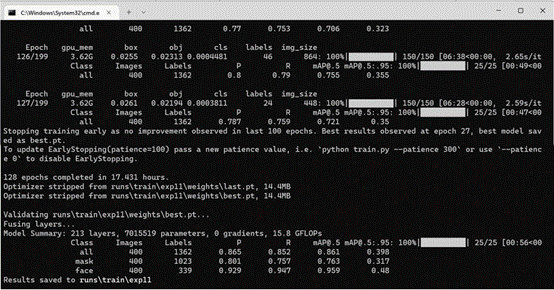
图 11 训练结果
由图可以看出,验证集一共有 400 张图片,1362 个标签(口罩 1023 个, 人脸 339 个)。总体的精度为 0.865,召回率为 0.852,mAP 值达到了 0.861, 但人脸和口罩的mAP 值分别是 0.959 和 0.763,可见模型总体的训练效果较好,对人脸识别的训练效果优于口罩。
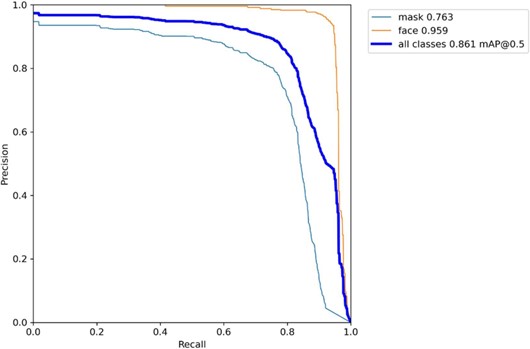
图 12 PR 图
由 PR 图可以看出,对比 mask 和 face 的 PR 曲线所包含的面积,也可以得出相似结论。
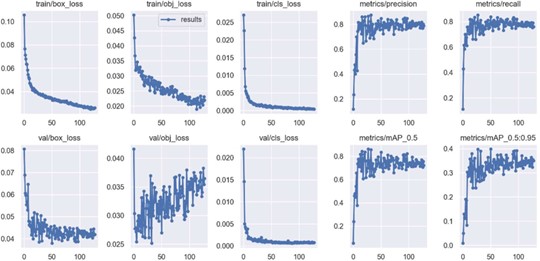
图 13 结果统计
由关于训练轮数的函数图可以看出,训练在 30 轮左右就已经达到较为理想的值,训练速度较快,证明参数设置较为合理。
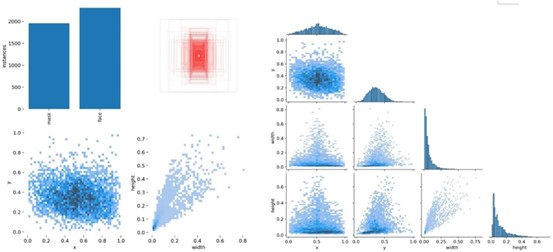
图 14 数据的分类、位置、大小数据分布统计

图 15 测试集结果
图 16 图形化界面测试结果
用自己拍摄的照片测试结果较好。
3.2.3 参数调试
YOLOv5 的参数皆可在指定的 YAML 文件下配置,也可以在运行时附加参数。分为以下几种
- 网络配置文件
(1) 模型的深度和宽度
(2) Anchor(预设了三种模式)
(3) Backbone
(4) Head
- 初始化超参数
(1) hpy 超参数(包括 lr、weight_decay、momentum 和图像处理的参数等)
(2) 训练超参数(包括预训练,batch-size,epoch 等) 由于时间与精力限制,主要进行了以下三个参数的调试:
l conf-thres:置信度,default=0.25
l NMS:非极大值抑制,default=false
l epochs:训练的轮数,default=200
根据控制变量的原则,并严格使用测试集而非训练集进行测试。
调试发现:①置信度越小,则不符合目标特征的对象越可能会被框选。置信度过大,符合目标特征的对象可能不会框选,经测试 0.25 为较优值。②NMS 的值并不会对检测产生明显的变化,推测这是由于 Anchor 参数已经被设置为小目标检测模式导致的。③训练轮数在 127 时已经和最后的最优结果(epoch=27)相差无几,继续增加训练轮数没有太大意义。
项目已上传 GitHub,地址:https://github.com/reasimei/yolov5-mask-detection
参考文献
[1] REDMON J, DIVVALA S,GIRSHICK R, et al. You only look once:unified, real-time object detection [EB/OL].[2020- 03-10].https:/arxiv.org/pdf/1506.02640v5.
[2] REDMON J, FARHADI A. YOLO9000: better, faster, stronger[C]//IEEE Conference on Computer Vision & Pattern Recognition, 2017:6517-6525
[3] 刘翀豪, 潘理虎, 杨帆, 张睿. 改进 YOLOv5 的轻量化口罩检测算法[J/OL]. 计算机工程与应用:1-11[2023-01-19].http://kns.cnki.net/kcms/detail/11.2127.TP.20221230.1300.011.html
杨锦辉, 李鸿, 杜芸彦, 毛耀, 刘琼. 基于改进 YOLOv5s 的轻量化目标检测算法[J/OL]. 电光与控制:1-11[2023-01-19].http://kns.cnki.net/kcms/detail/41.1227.tn.20221229.1556.002.html