模型预览
此模型大小共 16.5 MB ,需要一定时间加载,请耐心等待!
一. 选题背景
各国的军事战略与海洋战略的不断发展是为了争取海洋及滨海地区的技术优势和军事优势。中国的海洋地理环境十分广阔,十分重视海洋战略的发展。而作为海洋开发的平台和现代水中兵器的载体,水下机器人的技术研究十分重要。由于水下环境十分复杂,影响机器人系统对环境的适应性和相容性,经过数百年的进化,鱼类的游动能力变得高效、对特定水环境具有高度适应性并且十分的智能,于是基于仿生学原理及针对相应环境信息水下机器人的推进原理、控制算法、行动策略等的研究也就成为国际先进水下机器人技术研究的主要目标。
鱼类优良的游动运动方式给人类提高水下机器人推进系统的推进性能及与水环境的适应与交互性能带来了启迪,鱼类游动推进模式和仿鱼推进技术日趋成为水下推进器领域研究的热门方向。仿生技术、计算机技术、控制技术和材料技术的发展,为仿鱼水下机器人控制的理论和方法、动作原理、系统构成和实现、控制算法等方面的研究提供了强有力的支持,新型仿鱼水下推进器的研究成为目前水下机器人研究领域的热点,并取得了一系列成果。
开发水空跨介质航行器有重大意义,凭借它灵活快速的优势可实现诸多应用,从洪水期间的波浪采样到水生环境中的环境监测再到水生灾害的响应。将多地形移动能力集成在一个系统中,可以在海洋学、水库管理和农业领域中实现各种重要的应用。目前的水监测方法耗时耗力耗材,特别是在偏远或危险的海洋环境中,例如,在核事故期间、在北极地区或洪泛区。而跨介质飞行器可以在广阔的区域向基站提供样本,并且比单一领域的水上、空中或陆地系统反应更快。在民用领域,未来将有可能在海上航空失事快速搜寻、事故人员快速搜救等方面起到很大作用,对远距离探测目标,可先在飞行状态下以较短时间到达目标区域,再转入水下进行近距离观察,从而充分发挥水空跨介质航行器的优势。
本项目的难点在于,空气和水的密度相差近800倍,两栖航行器在两种截然不同的环境介质中运行时,所受的环境外力情况和相应的动力学响应都有显著差异,设计要求往往相互冲突。高功率密度的供应问题一直限制着机器人在实际任务中的应用,特别是小规模的应用。另外,因为存在额外的阻力和跨介质带出的水的质量,还需要快速加速到飞行所需的速度,从水面跃出到飞行的过渡是最耗电的过程之一。为了解决这些问题,本项目提出一种利用固体反应物生成可燃气体的跨介质推进系统,为未来机器人技术中水空跨介质推进提供了一种有前景的解决方案。
二. 创新点
-
采用固体燃料:跨介质航行器已经有利用螺旋桨或气体燃料实现跨介质的方案,但是使用固体燃料相关研究仍然较少,固体燃料性质稳定适合长期保存,对扩展跨介质航行器研究有重要作用。
-
不直接使用气体工质推进:通过机械自充水装置在每次点燃后实现自主水封。采用喷射水作为驱动方式,能量利用率较高。
-
轻型驱动系统设计:设计用于喷水推进的具有飞行能力的轻型驱动系统,能够承受高压和水生环境,同时处理电石反应、燃料点火、高压、无线通信、电源管理等多个任务。
三. 系统设计原理
3.1 化学反应
大量的燃料气体可以在高压下作为液体紧凑地储存。但这需要能够承受巨大压力的存储和调节系统,增加了复杂性和危险性并使组件变得更重。如果可燃燃料由两种独立的稳定组分反应产生,则可以避免高压,并且可以大大简化燃料储存和分配系统。用于气体储存的固体化合物的使用在许多应用中很常见,例如使用叠氮化钠分解释放氮气用于汽车安全气囊的展开、使用固体碱金属氢化物在燃料电池工业领域来储氢。
与水上推进更相关的是美国海军研究用于鱼雷推进系统的氢化锂或研究用于浮力控制的固体反应物。此外,用水作为反应物对于水空机器人来说是一个很好的选择,因为可以利用它们的环境来减少系统质量。
我们开发了一种燃料和点火系统,从周围的水体中抽出水滴并注入一个装有电石粉小容器中。这种方法对水滴进行计数可以很好地估计所产生的乙炔量。电石和水通过以下放热反应:
\(\mathrm{CaC}_2+2 \mathrm{H}_2 \mathrm{O} \rightarrow \mathrm{Ca}(\mathrm{OH})_2+\mathrm{C}_2 \mathrm{H}_2 \uparrow\)
生成乙炔气体逃逸到燃烧室中,在那里与空气混合。此过程中,每毫克产生 0.3 mg , 纯度为75%。最后,气体混合物被电弧点燃,发生以下反应: \(2 \mathrm{C}_2 \mathrm{H}_2+5 \mathrm{O}_2 \rightarrow 4 \mathrm{CO}_2+2 \mathrm{H}_2 \mathrm{O}\)
该反应高度放热,反应室内的温度和压力迅速升高。迫使水通过喷嘴,流出燃烧室,产生所需的推力。
3.2 喷气滑翔物理学
我们开发了一个解析物理模型,以深入了解压力演变和飞行轨迹,并确定各种机器人参数及其对机器人性能的影响。压力驱动有两个主要的物理问题。首先,机器人的外部视图解释了基于机器人上的力的飞行轨迹。其次,内部考虑使我们能够计算压力演变和推力。由于内部和外部的耦合,两组方程必须同时求解。这种耦合的发生是由于航行器的加速度对腔室中的水的影响,这对产生的推力有影响。应用于我们系统产生以下方程:
\[\Sigma \vec{F}=\overrightarrow{\mathrm{Th}}-\vec{W}-\vec{D}-\vec{L}\]在此步骤中,机器人被认为是一个在二维 (2D) 中移动的质点。Th表示喷射推力,W表示重量,D为阻力,L为升力。推力由欧拉流动方程给出,应用于从高压空气区(界面)到喷嘴的腔室。 \(\int_{\text {nozzle }}^{\text {interface }} \frac{\partial u}{\partial t} \mathrm{ds}+\frac{\Delta P}{\rho_w}+\frac{1}{2}\left(u_{\text {nozzle }}^2-u_{\text {interface }}^2\right)=0\)
假设压力 ΔP 遵循干绝热膨胀,初始压力 Pinit 由化学计量能量转换给出。 ρw是 20°C 时的水密度。腔室中的点流速 u 始终定义为: \(u(z, r, t)=\frac{\mathrm{dh}}{\mathrm{dt}}\left(\frac{\Omega(h)}{\Omega_{\text {nozzle }}}\right) f\left(\frac{r}{R(z)}\right)\)
速度作为水位高度 h、界面面积 Ω(h)、到轴 r 的距离和腔室尺寸 R(z) 的函数给出。机器人最重要的整体性能指标是每个喷射周期行进的距离,这可能会最大限度地发挥其任务的有用性。为了最大限度地提高跳跃滑翔性能,我们迭代了上述完整飞行的分析模型,改变了喷嘴直径、水的体积分数和发射角度,对行进距离进行优化。喷嘴直径 2.8厘米,最终总体积为 491 毫升,含水量为 40%,相当于 196.4 毫升。最后,通过分析发现最大飞行距离的最佳发射角度为 47°,并且改变了机器人的质量分布,使其以设定的角度漂浮。在推进阶段对腔室内的流动进行了 3D 计算流体动力学 (CFD) 研究,以验证在物理模型中获得的结果并了解 3D 中的流动行为。这确保了分析模型在制造机器人之前尽可能真实地表示条件。
四. 技术路线
4.1 跨介质推进器设计方案的提出
考虑到从水中起飞的高耗电性、机电驱动的限制性和环境外界的复杂性,项目难点在于选择一种合适的跨介质推进技术。
我们拟定使用固体反应物生成的可燃气体作为跨介质飞跃的动力,具体是通过电石粉末与可用的环境水反应生成可燃乙炔气体,采用蠕动泵从自然水体泵入反应所需要的水,随后通过导管将产生的乙炔气体导入到反应室,在反应室内点燃,以水为工质推进,从而使机器人能够从水中跃出,并快速达到飞行速度。
我们对燃烧、喷射和滑翔阶段分别进行数值建模,并与实验结果进行比较。经测算,0.5克电石可使360克的机器人飞行26米。
为了承受住乙炔爆炸产生的压力,机体我们选用短切碳纤维和环氧树脂,通过浸渍、烘干等工艺制作而成,与传统复合材料相比,其具有更高的强度和刚度,同时重量更轻、耐热性和耐腐蚀性更强。
4.2 机械设计
1. 设计图与实物图
俯视图:
左视图:
正视图:
实物图:

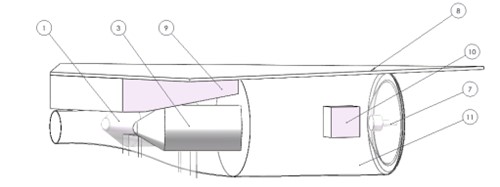
本项目的整体机械结构如上图简略所示。其中机械的主体部分为主体11,燃料罐1和3安装在主体1上,内部放置电石,通过与水反应生成乙炔,通过输气管(未画出)输送至进气与点火装置10后,使气体进入主体11内,当气体达到一定浓度后,点火装置10产生电火花点燃气体。由于单向阀7的存在,水能够通过单向阀7进入主体11,从而使得整体呈上倾姿态,当内部气体点燃后,巨大的压力使得单向阀7无法导通,从而气体产生的压力均从主体11尾部喷射出去,产生推力,推动整体机械结构冲出水面。
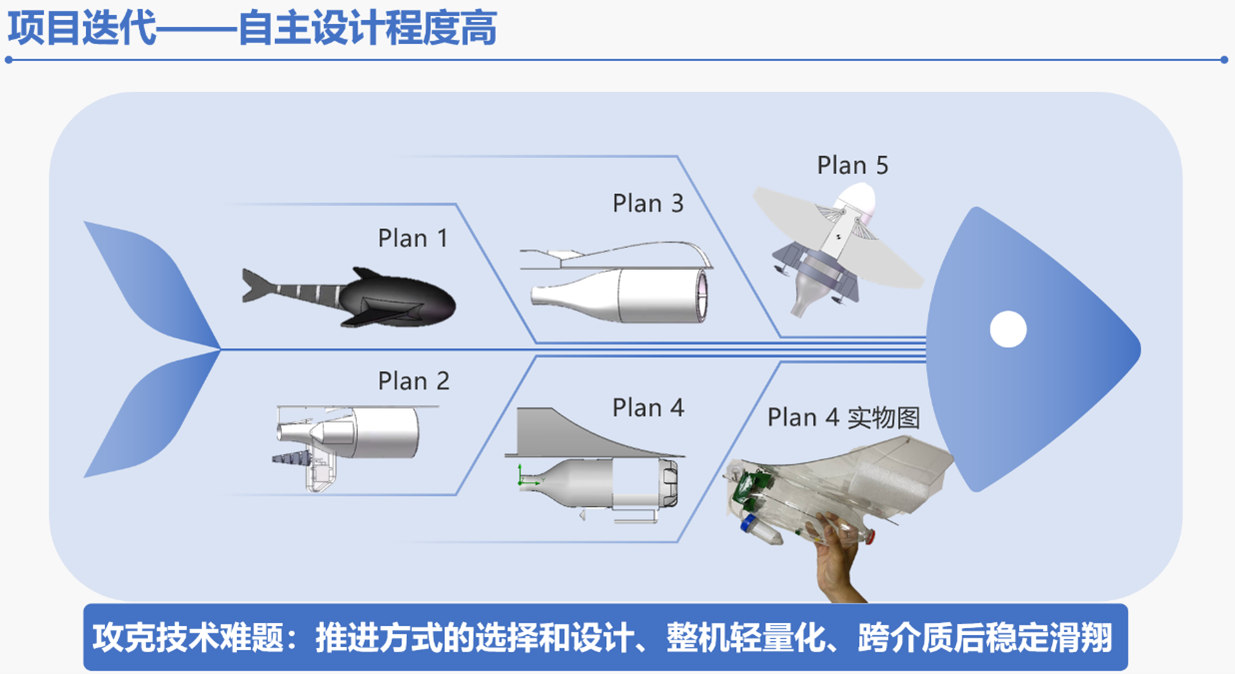
2. 机械方案迭代过程
3. 水中姿态自稳定原理
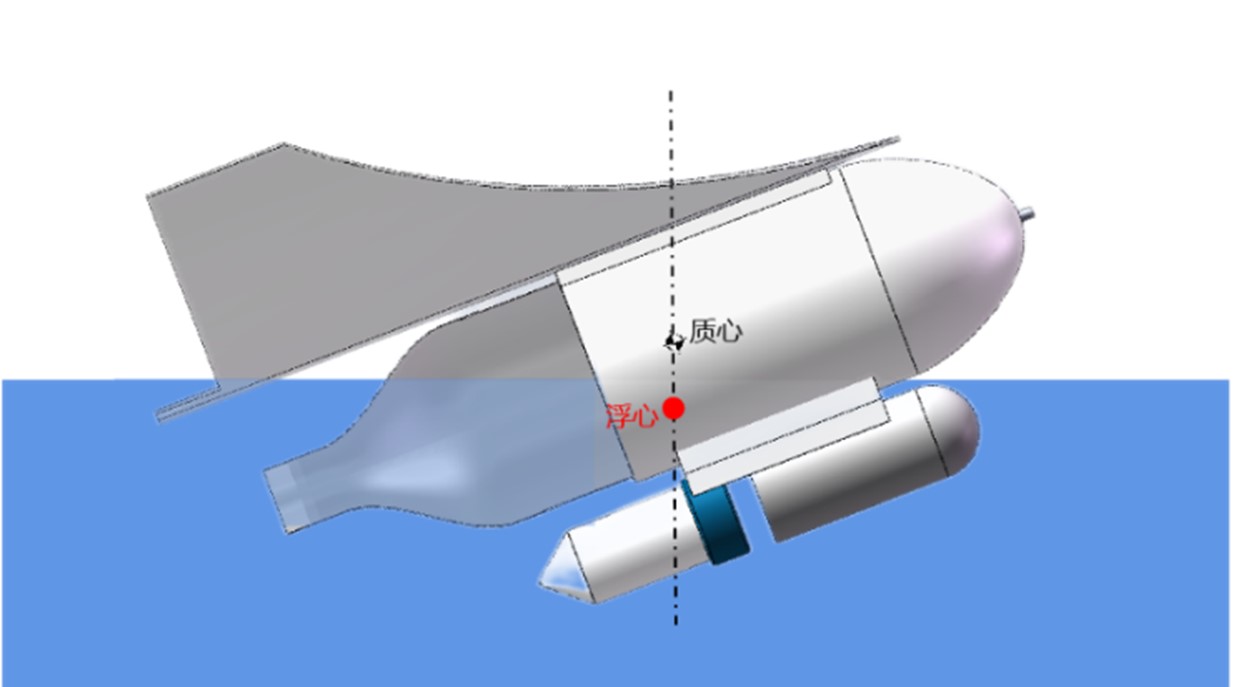
在航行器燃烧室头部安装有一气针,将燃烧室内部气压与外界大气压联通,当航行器落入水中后,水流由燃烧室尾部开口进入,当燃烧室内水平面上升时,压缩室内空气,从气针排出,当水平面浸没气针孔后,燃烧室内气压与水压共同作用与外部大气压平衡,此时水平面不再上升,航行器浸没于水中的体积不再变化,理想状态下,浮心与重心达到稳定状态,同时浮心与质心处于同一竖直线上,没有力矩作用,浮力与重力等大反向,航行器达到稳定的漂浮状态。

4. 航行器质心
根据航行器各部分的实际情况设置材料属性,利用SOLIDWORKS软件中质量属性评估功能,得到整机质量约为524克,整体质心基本处于航行器中间位置,因此,在实际的出水滑翔过程中,较好的质心位置能够进行角度回正控制,保障了航行器跨介质运动与滑翔的稳定性。
5. 流体仿真
通过SOLIDWORKS软件中Flow Simulation仿真功能对不同发射角度情况进行仿真,采用湍流单向流模型,仿真采用纳维-斯托克斯方程组进行求解。
\[\begin{gathered} \rho(u \cdot \nabla) u=\nabla \cdot[-p I+K]+F \\ \rho \nabla \cdot(u)=0 \\ K=\left(\mu+\mu_T\right)\left(\nabla u+(\nabla u)^T\right) \\ \rho(u \cdot \nabla) k=\nabla \cdot\left[\left(\mu+\frac{\mu_T}{\sigma_k}\right) \nabla k\right]+P_k-\rho \varepsilon \\ \rho(u \cdot \nabla) \varepsilon=\nabla \cdot\left[\left(\mu+\frac{\mu_T}{\sigma_{\varepsilon}}\right) \nabla \varepsilon\right]+C_{z 1} \frac{\varepsilon}{k} P_k-C_{z 2} \rho \frac{\varepsilon^2}{k} f_r\left(\rho, \mu, k, \varepsilon, l_w\right), \varepsilon=\sigma p \\ \nabla G \cdot \nabla G+\sigma_w G(\nabla \cdot \nabla G)=\left(1+2 \sigma_w\right) G^4, \ell_w=\frac{l}{G}-\frac{\ell_{r e f}}{2} \\ \mu_T=\rho C_\mu \frac{k^2}{\varepsilon} f_\mu\left(\rho, \mu, k, \varepsilon, \ell_w\right) \\ P_k=\mu_T\left[\nabla u:\left(\nabla u+(\nabla u)^T\right)\right] \end{gathered}\]求解得,在30°、35°、40°、45°时的仿真结果如下图所示。
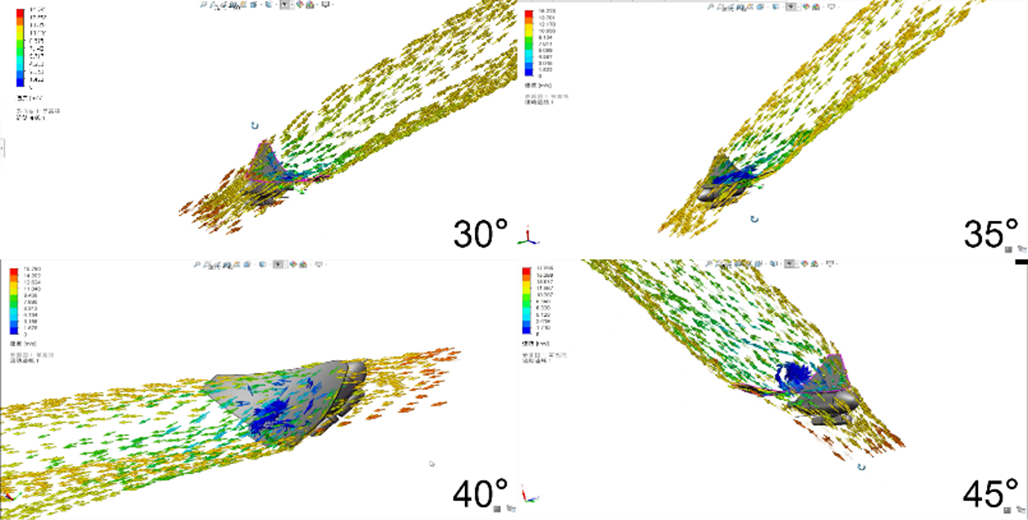
由仿真得,在发射角度为35°及以上时,机翼背部出现涡流,降低空气与机翼表面的附着性,导致失速。在发射角度为30°左右时,机翼背部无涡流,产生有效的附着效应,因此能够在机翼的上表面与航行器的下表面形成稳定的压强差,获得足够的升力,完成滑翔动作。
4.3 跨介质航行器的整体实现流程
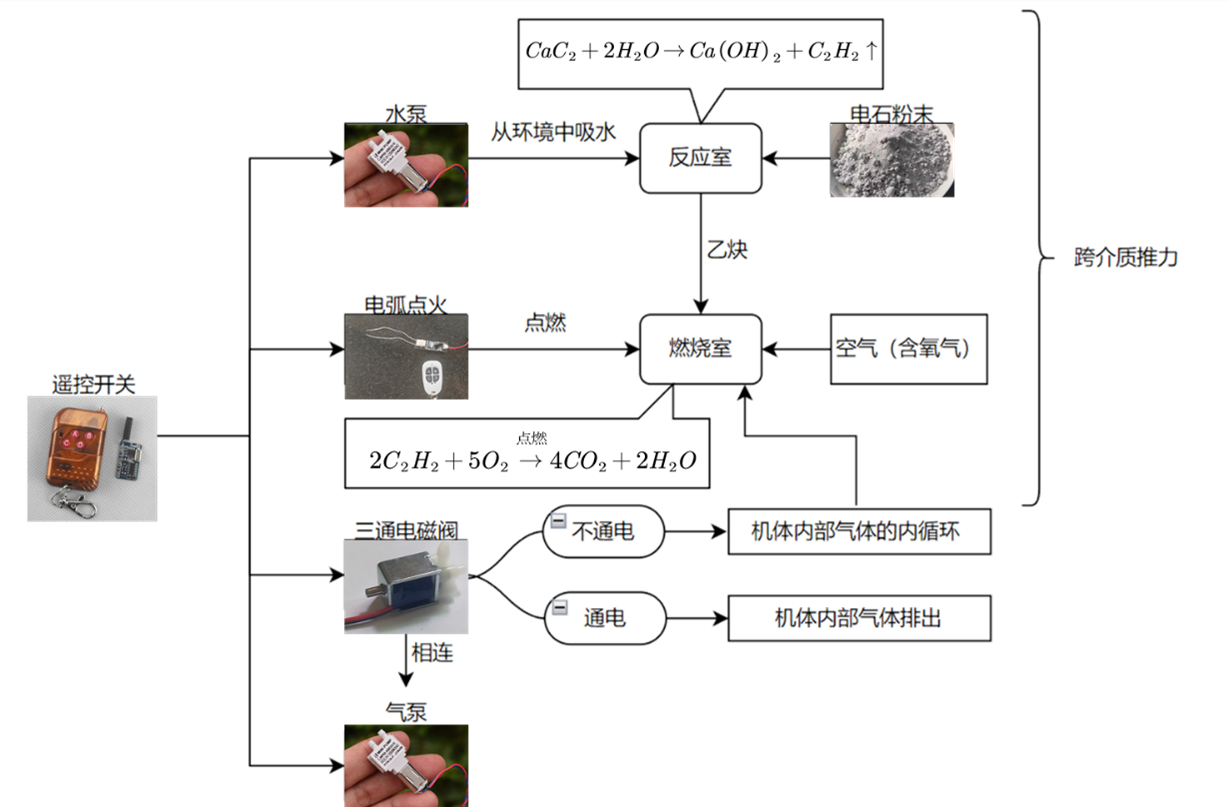
系统框架:本项目通过三路遥控开关分别控制蠕动泵从环境中吸水、电弧点火器点火、和三通电磁阀换向。前两者用于电石和水的反应,以及乙炔的点燃,从而产生推力。三通电磁阀与气泵相连,常开端实现机体内部气体的内循环,防止生成的乙炔和氧气接触不充分的情况,换向后用于将机体内部的气体排出,使整体密度增大,实现下沉。上浮通过再次开启水泵,电石和水反应生成乙炔将机体内部的水排出,整体密度降低,完成上浮。此时机体内部的气体全为乙炔,没有氧气,无法进行第二步反应,再次短暂地开启三通电磁阀,抽出少量乙炔,此时由于机体已经浮于水面,通过气针实现内外气压平衡,部分空气(含氧气)从气针进入机体内,关闭电磁阀继续内循环混合空气和乙炔,此时可以点燃进行第二步反应,实现二次跨介质。如此重复,直到反应室中电石耗尽。 供电方案:
五. 支撑作品的现有理论与技术
5.1 飞行器可变体技术
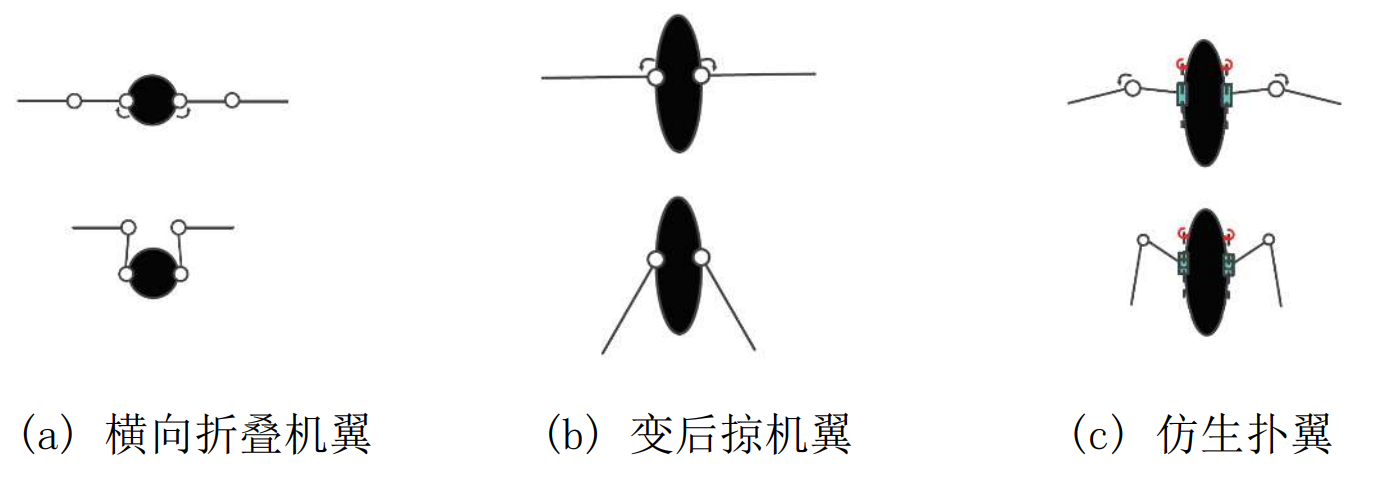
由于水空两种介质在密度、粘性等物理性质方面存在巨大差异,飞行器在两种介质中的运动特性截然不同,例如空中飞行阶段提供升力的机翼在水中航行时会带来巨大阻力,同时影响俯仰配平。因此,采用可变体技术在不同航行阶段自适应地改变构型,对跨介质高效稳定航行具有关键意义。跨介质飞行器可变体技术主要面向在不显著增加整体重量的前提下,空中飞行阶段增加升力降低飞行阻力,水中航行阶段降低航行阻力提升耐压能力,介质跨越阶段保证强度和稳定性。包括变翼型弯度、变厚度和变扭转在内的机翼中小尺度变形难以满足上述需求。目前跨介质飞行器主要采用的变体方案包括横向折叠机翼、仿生扑翼、变后掠机翼(如下图所示),但普遍面临铰链关节所需驱动力矩大、控制复杂等难题。
5.2 跨介质流体动力学分析
跨介质变体飞行器流体动力学分析面临的主要挑战是变体过程和介质跨越过程中的非定常流动特性分析。非定常流动特性分析与飞行器动力学建模通过理论分析、数值仿真或物理实验的方式实现。介质跨越过程涉及复杂的流动问题,是典型的气液两相流干扰运动,伴随有气垫效应、气液耦合作用、射流现象,以及入水空泡生长、发展和溃灭等过程,且海浪作用具有显著的非定常、非线性特征,从而对全面把握跨介质变体飞行器流体动力学特征带来挑战。同时,急剧改变的流场环境对飞行器的稳定控制也提出了很高要求。
5.3 跨介质组合推进
传统飞行器主要采用空气螺旋桨、空气喷气发动机和火箭发动机,其中空气螺旋桨自重较大,推进效率较低;空气喷气发动机需要吸入空气,无法在水中工作;火箭发动机一般工作时间较短,比冲较低,远距离航行能力不足。传统水下航行器采用水下螺旋桨、泵喷推进器和喷水推进器,其中水下螺旋桨通常与空气螺旋桨构型不同,难以通用;泵喷推进器和喷水推进器依赖水介质,无法在空气中工作。然而,直接为跨介质飞行器加装分别适合空中飞行与水下航行的两套推进系统将影响空间布局并增加结构重量,亟需研究一体化跨介质组合推进系统。目前跨介质仿生扑翼推进系统已在低速跨介质飞行器上完成样机实验。面对跨介质高速机动需求,则仍需要在氢燃料电池等高能量密度能源的基础上进一步研发一体化跨介质组合推进系统。
5.4 飞行器决策控制
跨介质变体飞行器为实现在起飞、巡航、水/空介质转换、潜航、静默潜伏、突防、打击等任务阶段全程稳定飞行/航行、自主变体,需要根据任务需求与当前环境开展在线智能决策,及时改变构型。同时,跨介质变体飞行器航行环境复杂多变、不同任务阶段构型差异显著,需要建立多刚体乃至多柔体动力学模型,并在此基础上研究一套快响应强鲁棒控制系统,保证在飞行器快速变形和参数大范围快速变化的情况下的稳定控制。
六. 应用前景
- 民用领域:水空跨介质航行器具有结构稳定,成本低廉,可适应地形广,可探测范围大等优点。由于水空跨介质航行器自身优良的机械结构,可保证其完成在各种复杂环境下的探测任务。在海洋探测,水质检测,水下生物研究,水中物质采样中可以发挥其广泛的用途。
- 军事领域:水下机器人作为海洋开发的平台和现代水中兵器的载体, 其技术研究重点从冷战时期对巡航和速度性能的关注转移到冷战后对机动和自治性能方面,基于极限环境下的先进水下机器人技术及其应用研究己成为各国研究和发展的重点。水空跨介质航行器在水下侦察,声纳采样,对敌方军事设施发动隐蔽打击具有很高的前景价值。可以设想,在不久的将来,水空跨介质航行器会成为独立与空中飞行器和水下航行器的第三类航行器。
七. 后续工作计划
- 利用变体技术加强机器人水下游动能力,如设计棘轮机构带动翼面展开,在水中时自动收回,保持流线型,在跨介质和空中时展开保持稳定。
- 部署集群算法实现多AUV协同工作扩展其应用场景,如平均移动向量法、势场法等。
八. 设计过程中所参考的文献
[1] 童朝锋,魏芷阳,孟艳秋.基于FLUENT的垂向二维数值波浪水槽的造波效果[J].水运工程.2020,(3).13~20.
[2] 罗驭川,黄振贵,高建国,等.截锥体头型弹丸低速斜入水实验研究[J].爆炸与冲击.2019,(11).77-84.doi:10.11883/bzycj-2018-0498.
[3] 路中磊,孙铁志,魏英杰,等.开放空腔壳体倾斜入水运动特性试验研究[J].力学学报.2018,(2).263-273.
[4] 何肇雄,郑震山,马东立,等.国外跨介质飞行器发展历程及启示[J].舰船科学技术.2016,(5).152-157.doi:10.3404/j.issn.1672-7619.2016.05.032.
[5] 杨海燕,林书玉,吝科.航行器在空中飞行与水下潜航时的动力学特性[J].华南理工大学学报(自然科学版).2015,(11).127-132,144.
[6] 邢文中,蒋蓁.海空无人机的构型设计与气动水动分析[J].弹箭与制导学报.2015,(4).113-117.
[7] 吝科,冯金富,张晓强,等.升力型潜水飞行器水空动力学特性研究[J].舰船科学技术.2014,(9).94-97,105.
[8] 杨兴帮,梁建宏,文力,等.水空两栖跨介质无人飞行器研究现状[J].机器人.2018,(1).102-114.doi:10.13973/j.cnki.robot.170241.
[9] 侯昭,孙铁志,张桂勇,等.回转体倾斜入水空泡试验及六自由度数值计算研究[J].宇航总体技术.2017,(4).38~45.
[10]廖保全,冯金富,齐铎,等.基于FLUENT的新型跨介质航行器气动水动特性研究[J].数值计算与计算机应用.2016,(4).265-272.
附录–成本明细表
| 费用项目 | 数量 | 金额/元 |
|---|---|---|
| 6mm短切碳纤维 | 1千克 | 150 |
| 斜纹碳纤维预浸布 | 1平方米 | 100 |
| 螺旋桨 | 4对 | 50 |
| 环氧树脂灌封胶 | 3千克 | 100 |
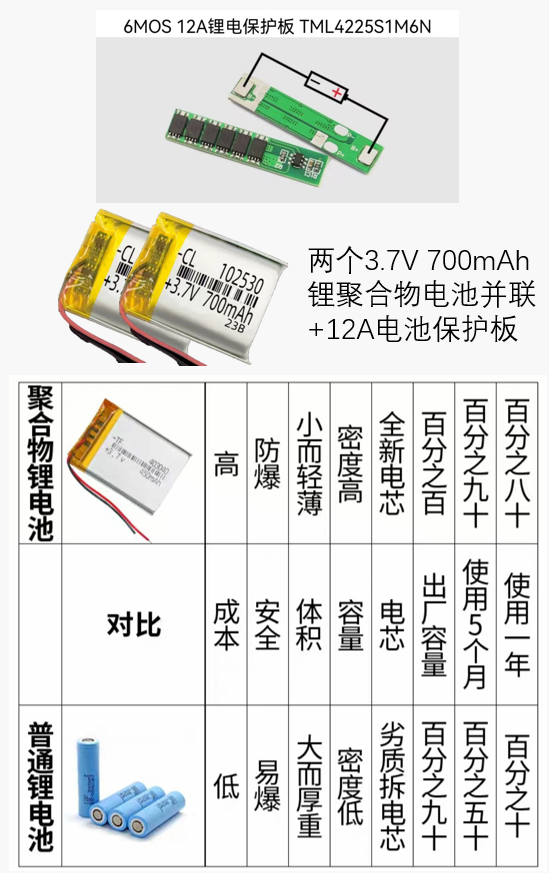
| 18650锂电池、3.7V 700mAh锂聚合物电池 | 若干 | 200 |
| 点火模块 | 4 | 200 |
| 接收机、遥控器 | 4对 | 200 |
| 空心杯电机、微型隔膜水泵 | 4 | 100 |
| 蓝牙遥控马达驱动模块 | 2 | 100 |
| 防水喷雾涂料 | 50ml | 50 |
| 工业烘干箱 | 1 | 500 |
| 电石 | 100克 | 10 |
| 其他零件(杜邦线、漆包线、对接线、电池保护板充电板、洞洞板、模具) | 若干 | 300 |
| 总计 | 2060 |