模型预览
此模型大小共 11.7 MB ,需要一定时间加载,请耐心等待!
一. 选题背景
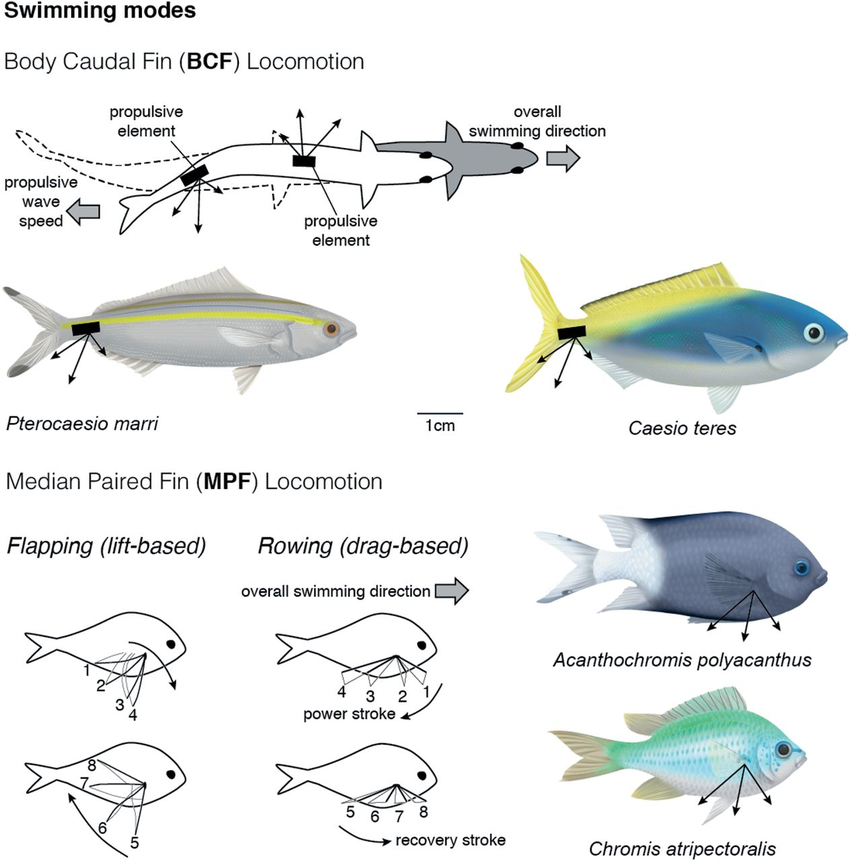
中国的海洋地理环境十分广阔,国家十分重视海洋战略的发展。而水下机器人作为海洋开发的平台和现代水中兵器的载体,其重要性不言而喻。但水下环境之复杂影响了机器人系统对环境的适应性和相容性,而鱼类经过数百年进化,不仅游动能力高效,而且对特定水环境具有高度适应性。于是基于仿生学原理及针对相应环境信息水下机器人的推进原理、控制算法、行动策略等的研究也就成为国际先进水下机器人技术研究的主要目标。 鱼类高效的游动方式给人类提高AUV系统的推进性能及与水环境的适应与交互性能带来了启迪。仿生技术、计算机技术、控制技术和材料技术的发展,为仿鱼水下机器人控制的理论和方法、动作原理、系统构成和实现、控制算法等方面的研究提供了强有力的支持,新型仿鱼水下推进器的研究成为目前水下机器人研究领域的热点,并取得了一系列成果。 据调查,BCF推进模式在平静空旷水域中能高速游动,而对于诸如低速游动、转弯机动、迅速加速及紊流环境等情况则是尤其低效的。而MPF推进模式中诸如刀鱼、蝴蝶鱼等鱼类采用的柔性长鳍波动推进游动模式集较高的推进效率、优良的机动性、稳定性于一体,具有低速下灵活机动、抗扰动能力强的特点。因此,对于研制自主水下航行器性能来说,仿鱼类长鳍波动推进模式具有相当重要的参考价值。 MPF中的长鳍波动模式中,已有对双波动鳍和四波动鳍的研究,没有对于三波动鳍的可行性的研究。故对于三波动鳍是否有更高的推进效率、双波动鳍及四波动鳍不具备的优点如稳定性与平衡性的研究十分重要。AUV具有广泛的应用前景和潜在的应用价值,很多科研工作者都致力于基于AUV的开发,我们团队也希望能为国家尽一些自己的研究力量。
二. 创新点
1、采用三波动鳍的形式:波动鳍具有较高低速稳定性与机动性,是其他推进方式无法比拟的。在长鳍波动式中已有对二波动鳍和四波动鳍的研究,而对于三波动鳍的研究较少,根据实验以及数据分析,三波动鳍具有更好的平衡性与稳定性,故选用三波动鳍。 2、可实现水路两栖:用单独的舵机控制每个鳍条的运动:分别控制鳍条的运动使其具有更好的机动性,并且通过舵机的单独控制可以使他们调节到受到相对小的阻力,并且具有良好的同步性,达到闭环控制的效果。 3、可以远程控制、远程升级,并有可拓展设计方便日后更新迭代。
三. 设计原理
3.1 模型构建
本项目构建了一个三波动鳍仿生雨翎电鳗装置,三波动鳍均匀分布于水密舱体周围。波动鳍的推进机理非常复杂 ,其运动形式也因不同推进情形而有所不同 ,但在稳态游动阶段 ,主要呈现为类正弦波形,本项目的三波动鳍结构可利用背鳍与丝杆滑块配合九轴陀螺仪模块使舱体快速达到稳态游动阶段,利用剩余两鳍进行正弦波的推进运动学解算,不仅有着偶波动鳍在低速下的高精度运动能力与快速加速能力,也使得控制更加容易稳定。
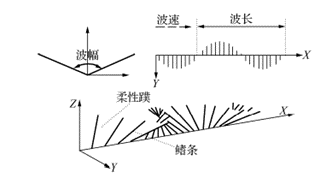
本仿生波动鳍装置的最大波幅为60°,舵机供电为8.4v,每个鳍面相邻的鳍条的运动状态可由下得
θ(n) =θ0 (n) +θmax (n) [ωt + e(n) ] (1)
θ(n)代表第n根鳍条当前的运动角度,θ0 (n)代表第n根鳍条的初始角,θmax (n)代表第n根鳍条的最大波幅,ω是角频率 ,ω= 2πf , f 是波动鳍的动态波动频率,e(n)是第n根鳍条相对第一根鳍条的相位差。
上式就是本项目对鳍面控制的基础模型与依据。当然,往年对MPF的研究中还涉及发散波,收敛波等的研究,但是对稳态状态的航行器来说,类正弦波的模型是最容易实现的。本项目作为三波动鳍仿生航行器,其奇鳍配合丝杆滑块能做到四自由度的平衡控制,对于稳态航行的实现有着天然的优势,所以本文着重分析类正弦模型下的运动。
3.2 推力产生机理
由于流体的可变性与复杂性,鱼类游动的推进机制的研究相比其他领域更加复杂,随着流体力学的导入,在水洞实验,流体建模与数值计算的帮助下对鱼类推进机制产生了许多不同的理论。以下将展示一种波动鳍鱼类推进的近似模型供设计参考。
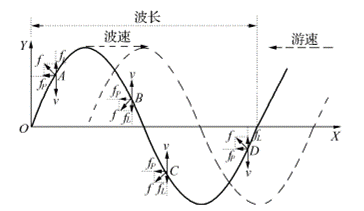
下图给出了波动鳍波动时鳍面波传播从而产生推力的示意图,图中实线是当前时刻的鳍面波,虚线是下一时刻的鳍面波 , A 、B 、C、D 是鳍面的 4 个微小体元. 从中可知 , A 点靠近 X 轴运动,由于流体阻力 ,它在垂直鳍面的方向上受到一个阻力 f ,且可分解为 X 方向 (纵轴) 上的fP和 Y 方向(侧轴) 上的 fL ;同理 , B、C和 D 点也受到类似的fP 和fL . 在一个波长内,对所有微小体元所受到的 fP 和 fL 进行积分 ,可知 fL 相互抵消,而 fP 的大小为各个微小体元所受 fP 的绝对值累加 ,方向与鳍面波的传播方向相反。这样 ,在整波长内 ,作用在鳍面上的合力为与波传播方向相反的推进力 ,且所有体元均对此有贡献。
四. 系统设计原理
4.1 水下机器人的整体实现流程
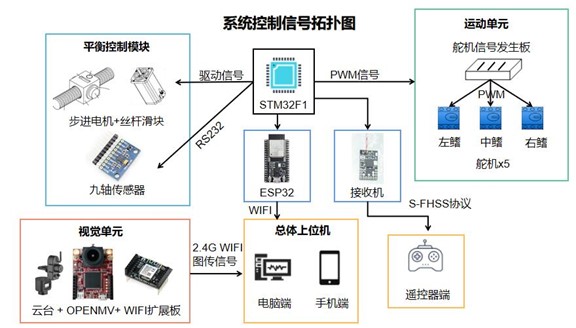
本项目组模仿MPF推进方式,通过波函数使STM32F1芯片发送PWM至舵机信号发生板,使舵机拉动刚性鳍条转到对应角度,从而使鳍面形成运动波形并产生稳定推力;通过接收九轴传感器数据并滤波对水下机器人进行运动学解算与分析以修正航向,配合改变舵机转动频率及内部丝杆滑块位置,以调节重心实现自稳定,将整个系统闭环。我们还通过自制云台和openmv使用2. 4G WIFI频段的无线电信号进行图传与远程通讯,能得到无人机正前方视场角为130° 的图像并通过传回数据对水下无人机进行远程参数调整与控制。最终,三波动鳍可实现六自由度运动,位置保持及换向等动作,具有良好的低速稳定性和机动性。波动鳍水下无人机的应用在不同领域正在飞速扩展,对波动鳍推进进行全面的系统研究并实际应用有着非常重要的实际价值。
4.2 驱动单元设计方案的提出
根据不同的划分依据可以得到不同的驱动单元设计方案,下面根据驱动单元动力源的设置方式和驱动单元同步运动的选择方式,选择了舵机作为驱动单元。 驱动单元主要任务是调节鳍面的形状以获得推进力,根据实际工作特性,可以将其分为控制系统、运动系统和导向系统三大部分。其中导向系统实现舵机对鳍面的传动功能,其结构较为简单,主要由多个连接舵机的刚性鳍条组成;控制系统通过控制PWM信号的占空比来控制舵机转动的速率和转向角度,从而改变鳍面的形态;而运动系统主要起驱动作用,其内部的驱动板能确保舵机的闭环控制,避免了多个舵机间延迟大,角度环与速度环不同等现象,使整个系统的受力趋于可控。
4.3 硬件设计
1.系统逻辑供电搭建
整个系统的电源需要有 11.1VDC,8.4VDC,5VDC,其中8.4V直流电给电机和丝杆滑块供电,5V 直流电给PWM发生器、底层控制板和传感器等部件供电。供电电路配置 4块UBEC电池分离系统,1 块 11.1v航模电池,以及多个接触器等电器元件,具体电气图如下图所示。
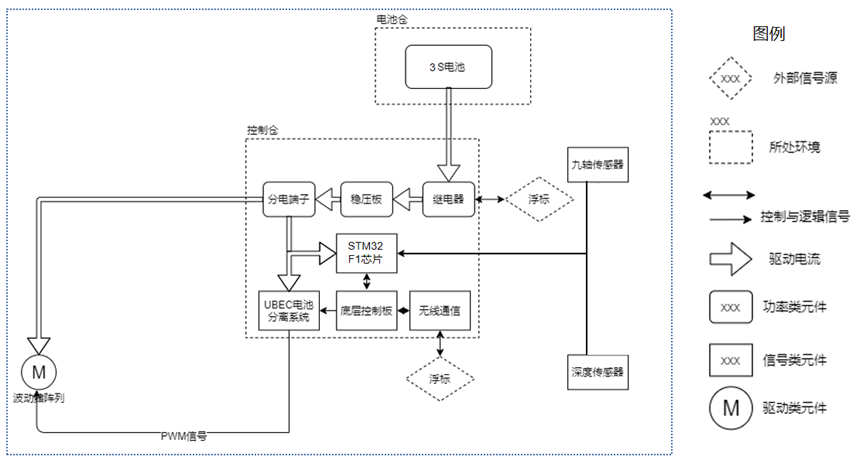
为保证实验安全,在上述供电电路中加入UBEC电池分离系统。当驱动器遇到故障时会自动切断电池引出的所有电压。 通过UBEC系统能够实现实现弱电控制强电、自锁以及保护的功能。
2.数据收发电路设计与搭建
整个系统运行在 STM32F1中,数据收发电路主要包括的硬件有:2.4G收发图传模块、无线模块、以及IPEX通讯接线等。 由于系统支持RS232通讯协议,因此电机驱动器和各个传感器之间通过线型连接,采样频率可达到1KHZ,精确同步时间小于 50μs,完全满足数据交换的要求。而九轴传感器采用卡尔曼滤波输出最终上传到控制器。
4.4 软件设计
在本设计中,主控制器需要快速响应交互的操作指令,高速完成数值求解计算,同时快速执行程序算法因此对控制器的逻辑运算和实时处理提出了较高的要求。经选型,OPENMVH7 主控制器可满足系统的功能要求,配置优化后的具体参数如下:
1)CPU采用STM32H7,主频可达到480MHZ,采用Python作为编程语言,可以远程更改航行器固件。
2)运行内存选为64MB。
OPENMV的软件系统是基于C语言的RTOS设计的,主控制器既可以作为上位机发送指令,也可以作为下位机直接控制设备并获取设备状态。PWM发生板的软件系统则比较简单,主要以循环与中断来得到信息并刷新舵机控制状态。
安装MicroPython运行核之后,主控制器成为具有实时能力的主控制器。
驱动单元的软件系统主要包括 HMI 交互模块、闭环控制算法以及运动控制模块等部分。交互模块主要完成机器和人之间的信息交换,具体包括工作模式的选择、参数的设置、状态的读取以及错误的监视等等功能,闭环控制算法主要是针对不同的实验模式进行程序设计,计算在不同控制策略下的驱动单元运动轨迹。
为了便于理解我们将运行MicroPython运行核的OPENMV4H7称为上位机,将PWM发生板称为下位机,上下位机之间通过RS232接口进行通讯。
4.5 机械设计
设计爆炸图:
机械设计图:
设计装配图:
实物装配图:

五. 相关实验数据
5.1 自身属性
表1 整体数据
| 体积/cm^3 | 重量/g | 密度/(g/cm^3) |
|---|---|---|
| 3493.32 | 3418 | 0.9785 |
表2 波动鳍数据
| 鳍面高度/cm | 鳍面长度/cm | 鳍面厚度/mm | 鳍面材质 | 鳍面弹性模量/Gpa | 鳍面泊松比 | 鳍条数目 |
|---|---|---|---|---|---|---|
| 11.65 | 外环:66.75 内环:50.09 | 1.8 | 硅橡胶 | 1.2 | 0.48 | 3*5 |
表3 其他数据
| 驱动方式 | 可调参数 | 推进性能 |
|---|---|---|
| 180°舵机 | 波幅、波频、波长 | 六自由度运动; 推进速度0.2m/s |
5.2 滤波设计
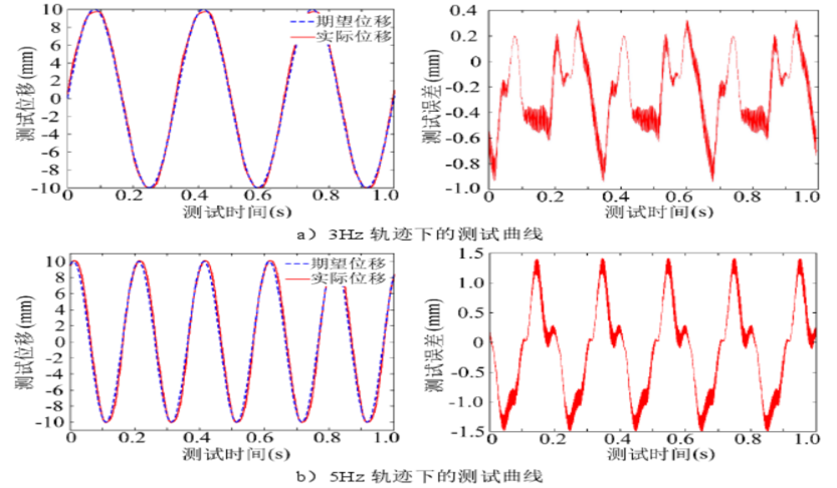
尝试了两种不同的滤波算法和控制算法,经过比较发现:对九轴数据进行卡尔曼滤波后进入模糊PID算法的自稳态三轴加速度数据,比进行窗口滤波后进入线性控制算法,偏差小、更稳定。
1.卡尔曼滤波+模糊PID

2.窗口滤波+线性控制

3.水下预期波形与实际波形的偏差情况
六. 国内外研究现状
| 研制单位(时间) | 仿生对象(推进模式) | 驱动方式 | 可调参数 | 性能 |
|---|---|---|---|---|
| 英国哈利尔特—瓦特大学(2001年) | MPF波动式推进模式 | PBAs(膜盒致动器) | 波频、波幅 | 可以实现三维运动 |
| 美国西北大学(2003年) | “黑魔鬼”鱼(Gymnotiform) | 伺服电机 | 波频 | 可以实现三维运动 与制动 |
| 日本大阪大学(2005年) | 鳐鱼(Rajiform) | 伺服电机 | 波频、波长 | 6自由度运动,速度可达0.4m/s |
| 新加坡南洋理工大学(2005年) | 乌贼(Amiiform) | 伺服电机 | 波频、波幅、波长 | 正逆向推进 |
| 中国国防科技大学(2004年) | 尼罗河魔鬼鱼(Amiiform) | 保密 | 波频、波长 | 正逆向推进,速度可达0.9m/s |
| 爱沙尼亚塔尔图大学(2004年) | 鳐鱼(Rajiform) | EPA(人工肌肉) | 波频、波幅、波长 | 推进速度0.005m/s,波幅可达15mm |
七. 应用前景
- 民用领域:三波动鳍仿生机器人具有结构稳定,低速稳定,可适应地形广,可探测范围大等优点。由于三波动鳍仿生机器人自身优良的机械结构,可保证其完成在各种复杂环境下的探测任务。可以在水下摄影、水下研究、海洋探测等领域发挥其广泛的用途。
- 军事领域:水下机器人作为海洋开发的平台和现代水中兵器的载体, 其技术研究重点从冷战时期对巡航和速度性能的关注转移到冷战后对机动和自治性能方面,基于极限环境下的先进水下机器人技术及其应用研究己成为各国研究和发展的重点。仿生机器人其良好的隐蔽型使得其在军事领域也备受各国青睐、而对于控制算法、行动策略等的研究也就成为国际先进水下机器人技术研究的主要目标,三波动鳍仿生机器人在水下侦察,声纳采样,对敌方军事设施发动隐蔽打击具有很高的前景价值。
八. 设计过程中所参考的文献
[1] 王光明. 仿鱼柔性长鳍波动推进理论与实验研究[D]. 国防科学技术大学.
[2] 章永华. 柔性仿生波动鳍推进理论与实验研究[D]. 中国科学技术大学.
[3] 王光明,胡天江,李非,等.长背鳍波动推进游动研究[J].机械工程学报,2006,(3).88-92.doi:10.3321/j.issn:0577-6686.2006.03.015.
[4] 林龙信.波动仿生推进器柔性长鳍的波动控制技术研究[D].国防科学技术大学,2005.1-61.
[5] Sfakiotakis M.,Lane D.M.,Davies J.B.C..Review of fish swimming modes for aquatic locomotion[J].Oceanic Engineering, IEEE Journal of,1999,24(2).237-252.
[6] 苏文明.咽颌模式仿生胸鳍的控制系统研究[D].中国矿业大学,2014.95.
[7] 魏清平,王硕,谭民,等.仿生机器鱼研究的进展与分析[J].系统科学与数学.2012,(10).1274-1286.
[8] 赵硕,冯正平,郑天海,等.近水面低航速下潜航器深度自抗扰控制[J].舰船科学技术.2020,(1).28-31.doi:10.3404/j.issn.1672-7649.2020.01.006.
[9] 王睿,王硕.模块化仿生波动长鳍水下推进器的设计与实现[J].华中科技大学学报(自然科学版).2015,(z1).408-411.
[10] 徐海军,潘存云,张代兵,等.不同水下仿生推进器性能影响的比较[J].机械设计与研究.2010,(1).93-96.
附录–成本明细表
| 费用项目 | 数量 | 金额/元 |
|---|---|---|
| 180度舵机、鳍条 | 30 | 8000 |
| STM32单片机、ESP32开发板 | 1 | 100 |
| 无线烧录器 | 1对 | 300 |
| OpenMv及WiFi扩展板 | 1 | 800 |
| 3s航模锂电池 | 1 | 100 |
| ubec电池分离系统 | 2 | 100 |
| 接收机、遥控器 | 1对 | 200 |
| 步进电机、丝杆滑块、驱动器 | 1 | 300 |
| 各类传感器 | 1 | 300 |
| 金属定制件 | 1 | 300 |
| 3D打印件 | 若干 | 100 |
| 密封舱 | 1 | 500 |
| 其他零件(杜邦线、漆包线、洞洞板、螺丝、螺母、密封胶) | 若干 | 200 |
| 总计 | 11300 |